QGC+PX4+AirSim软件仿真(Linux+Windows下)
本文介绍使用QGC+PX4+AirSim实现QGC控制无人机飞行并在AirSim中显示仿真画面。
环境为:Windows 10 + Ubutnu 20.04 LTS
PX4
从PX4-Autopilot下载源码
按照官方流程安装ROS1 noetic
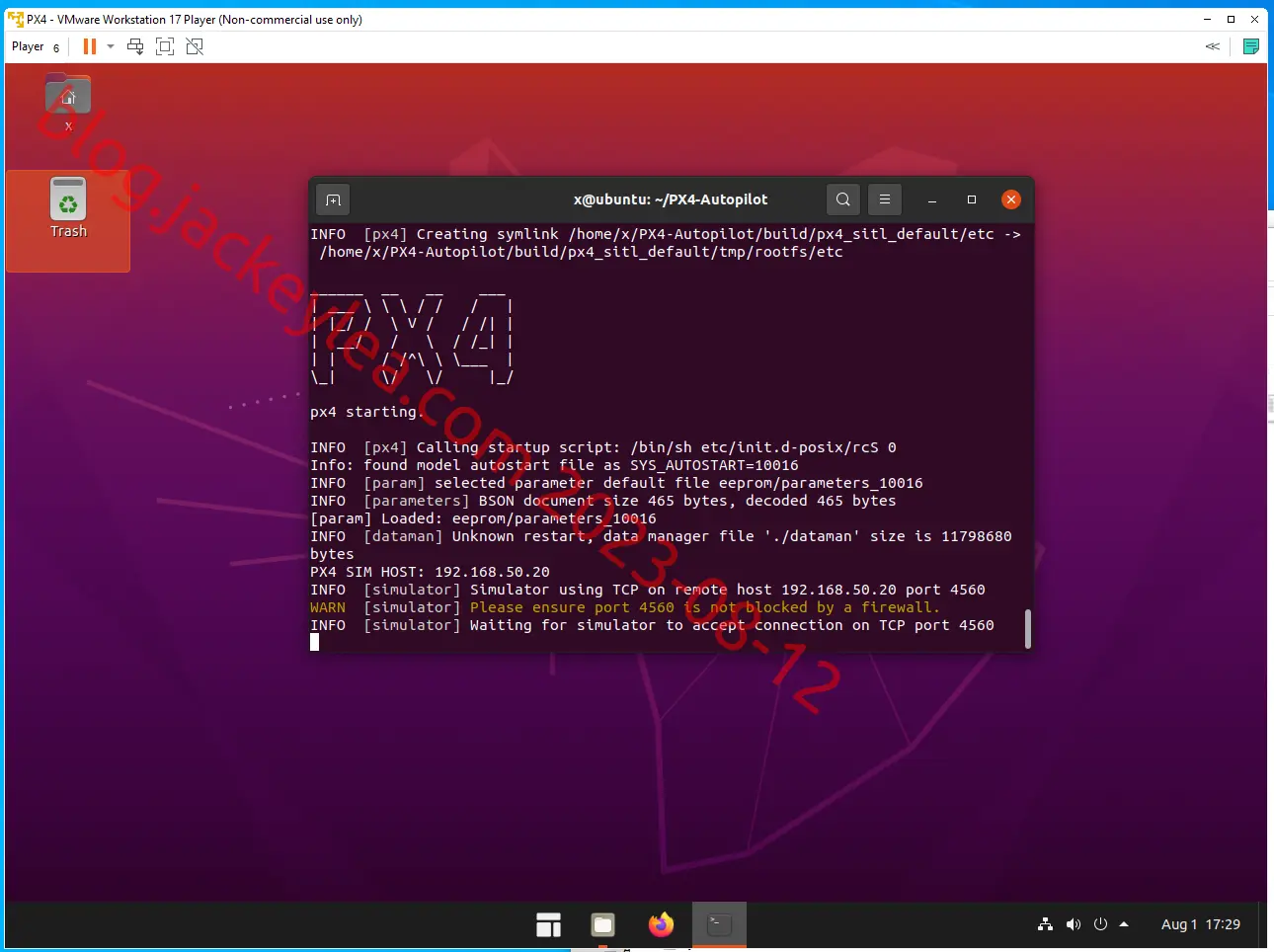
进入PX4源码目录
1 | |
编译完成后,终端等待TCP连接
AirSim
Windows
端口
打开防火墙的TCP输入4560,输入UDP14540
配置文件
在Documents目录下创建AirSim目录
在AirSim目录中添加settings.json文件
添加内容
1 | |
LocalHostIp是Windows所在的IP
仿真环境包
从AirSim下载ZhangJiaJie包
解压
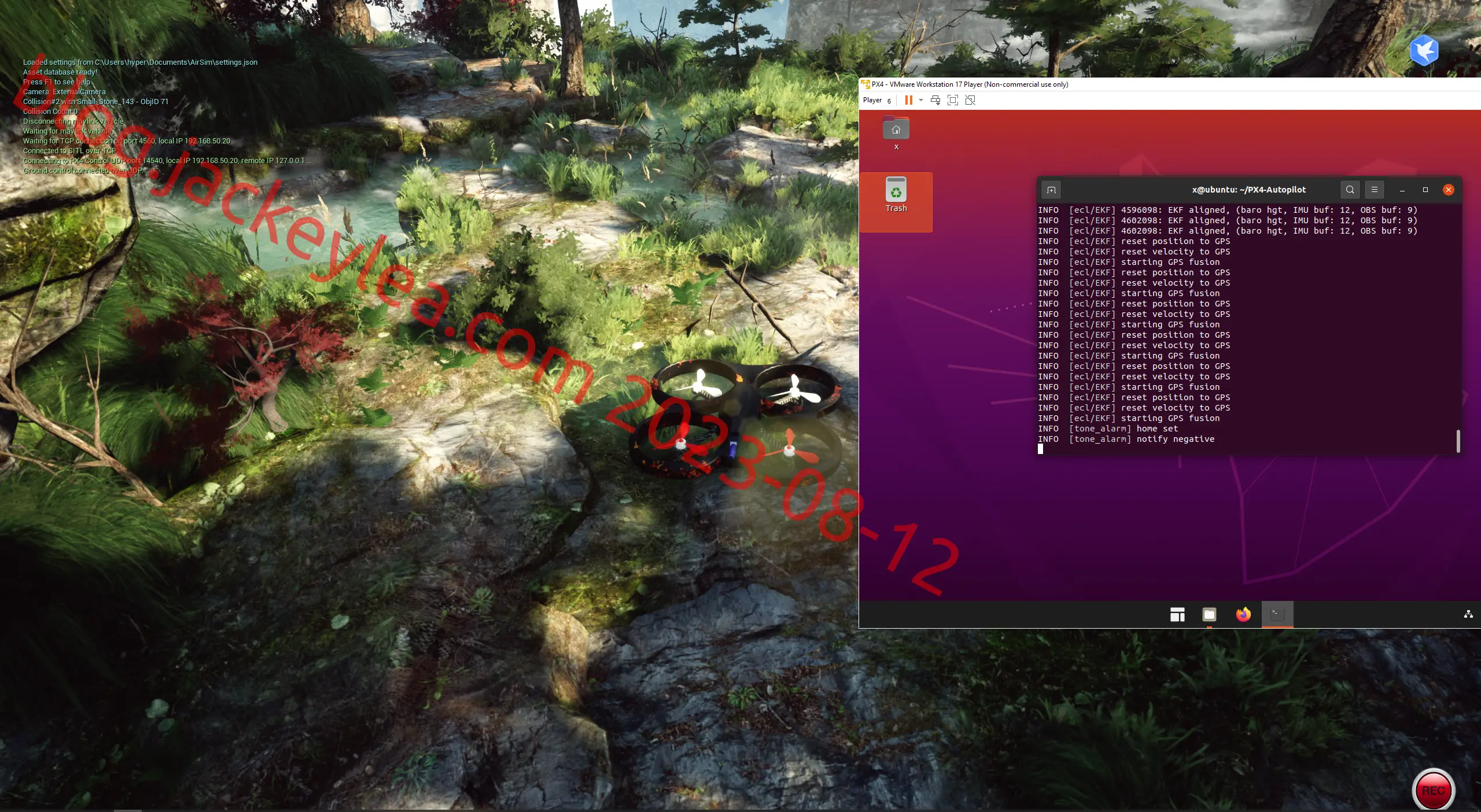
双击启动ZhangJiaJie.exe
启动后,PX4终端自动属性显示
Linux
Linux平台下ZhangJiaJie仿真包会依赖一些库,还没有解决。
暂时无法运行。
QGC
打开QGC软件
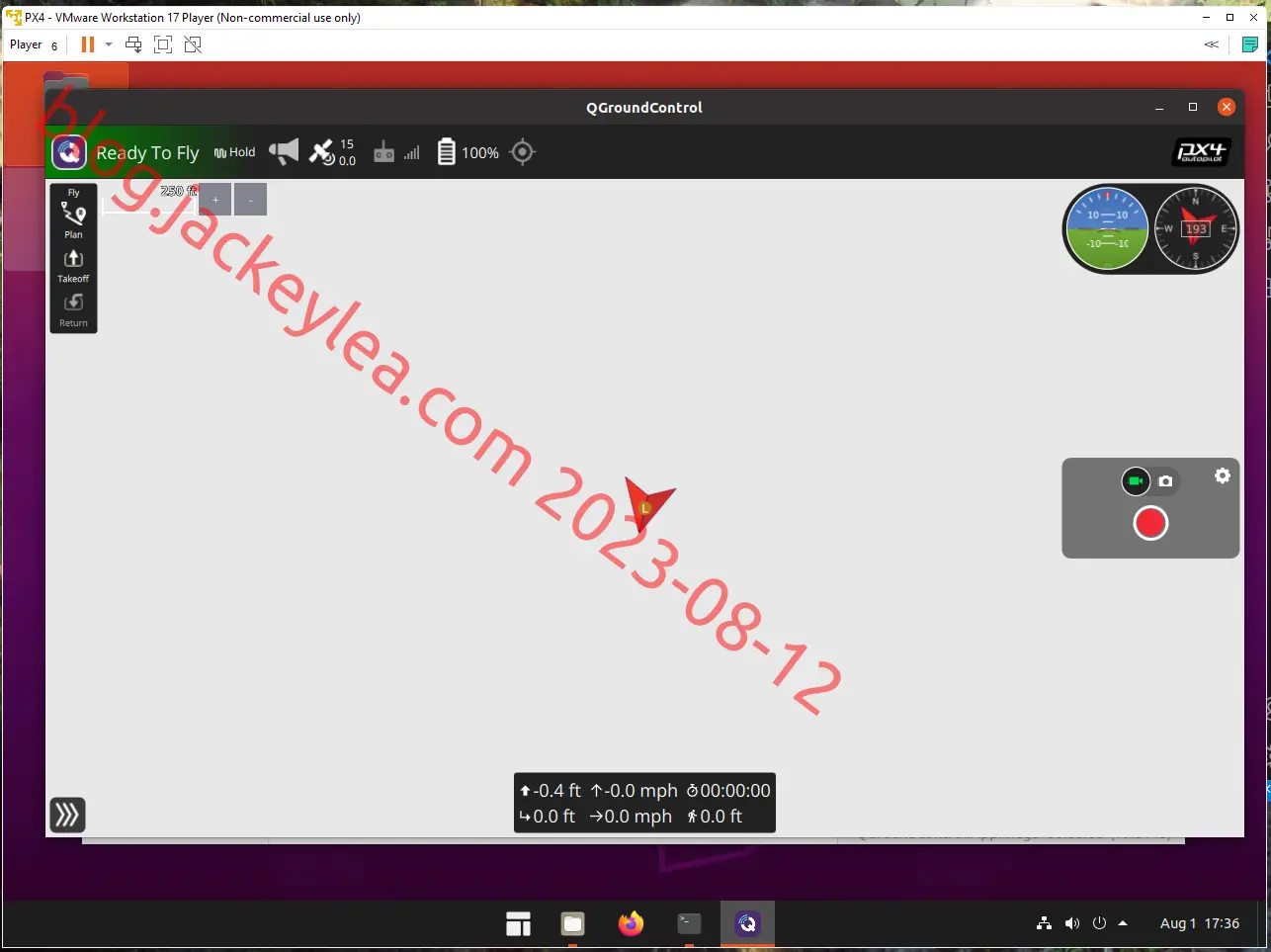
点击起飞
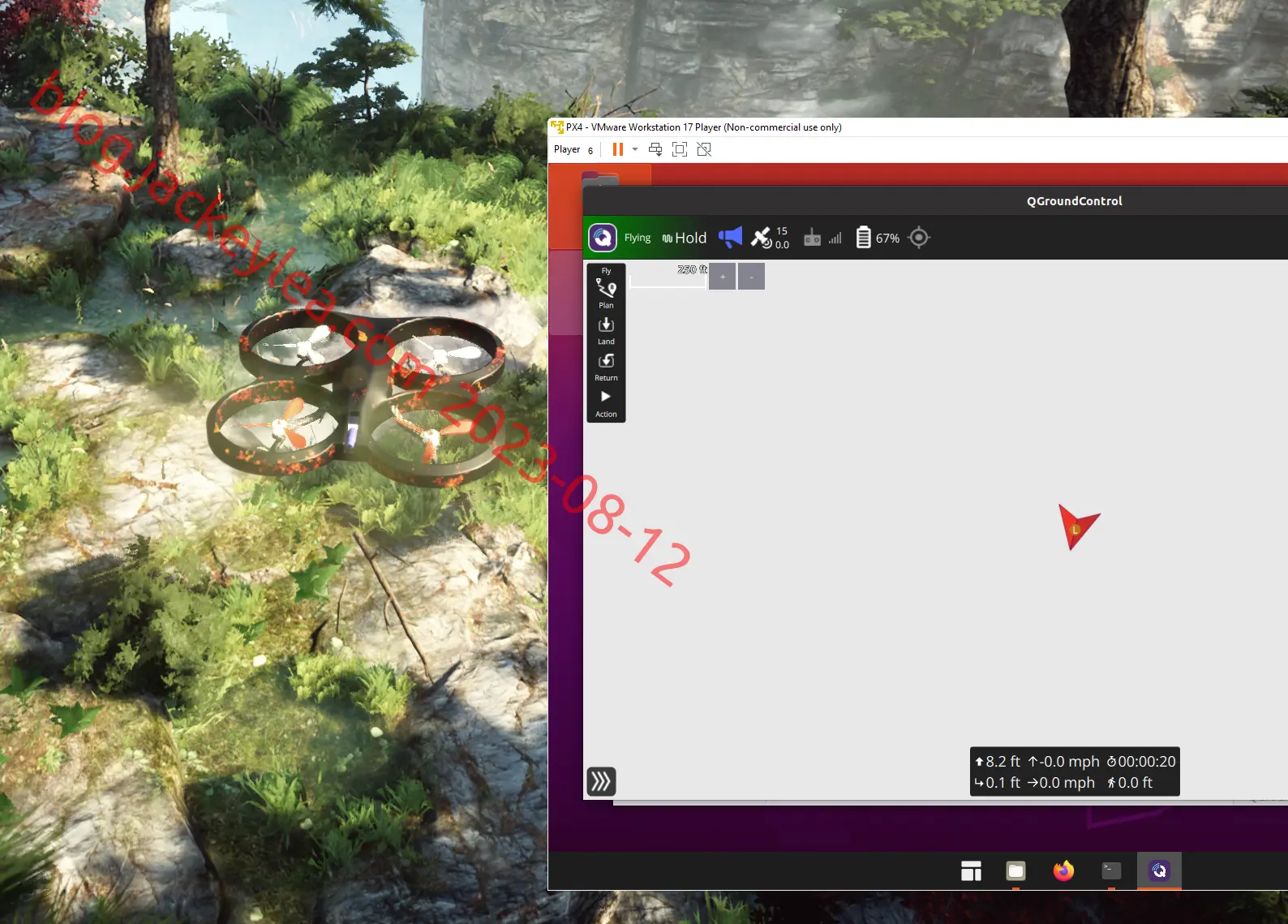
无人机会自动起飞并悬停在空中。
参考资料
QGC+PX4+AirSim软件仿真(Linux+Windows下)
https://blog.jackeylea.com/sim/simulation-with-qgc-px4-airsim-under-linux-windows/

