Vega Prime入门教程08.07:坐标系简介
Vega Prime入门教程索引:Vega Prime入门教程索引
模型坐标系
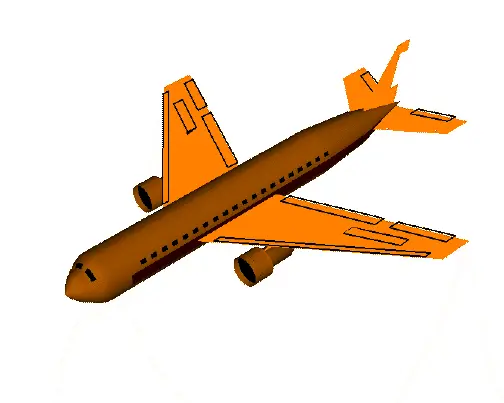
Vega Prime物体(对象、模型、model)坐标系(6个自由度)如下图:
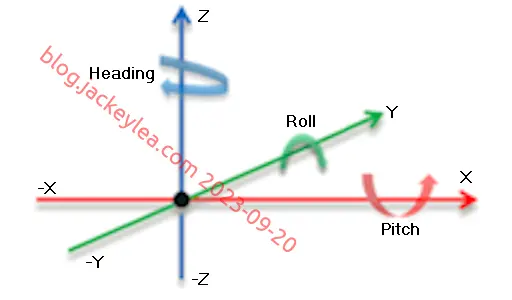
- xyz三个平移自由度不需要细说
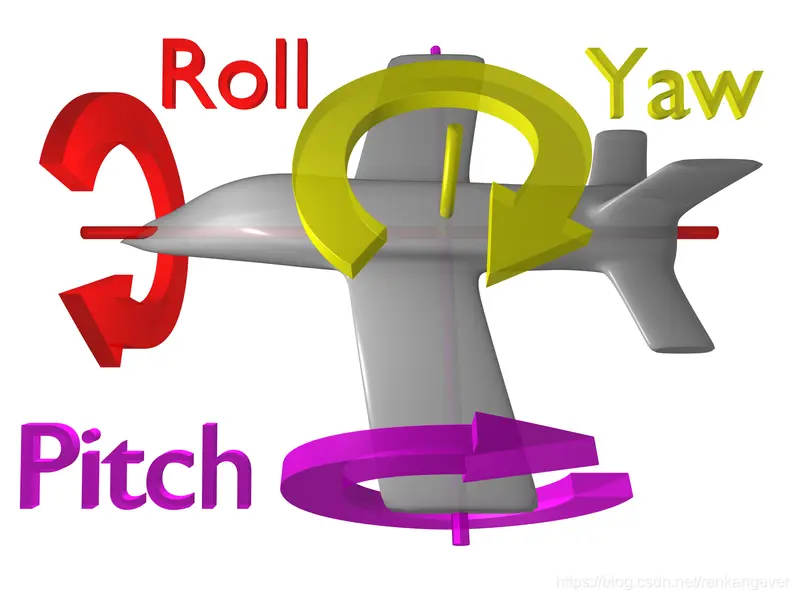
- xyz三个旋转自由度被命名为HPR,Heading(yaw)/Pitch/Roll,航向角/俯仰角/横滚角
- 可以看到顺时针为正
- 从图可以看出,航向/俯仰/横滚是飞行器的参数,Vega Prime应该是为了方便开发,非飞行器也使用这些名词
 |  |
 |  |
演示
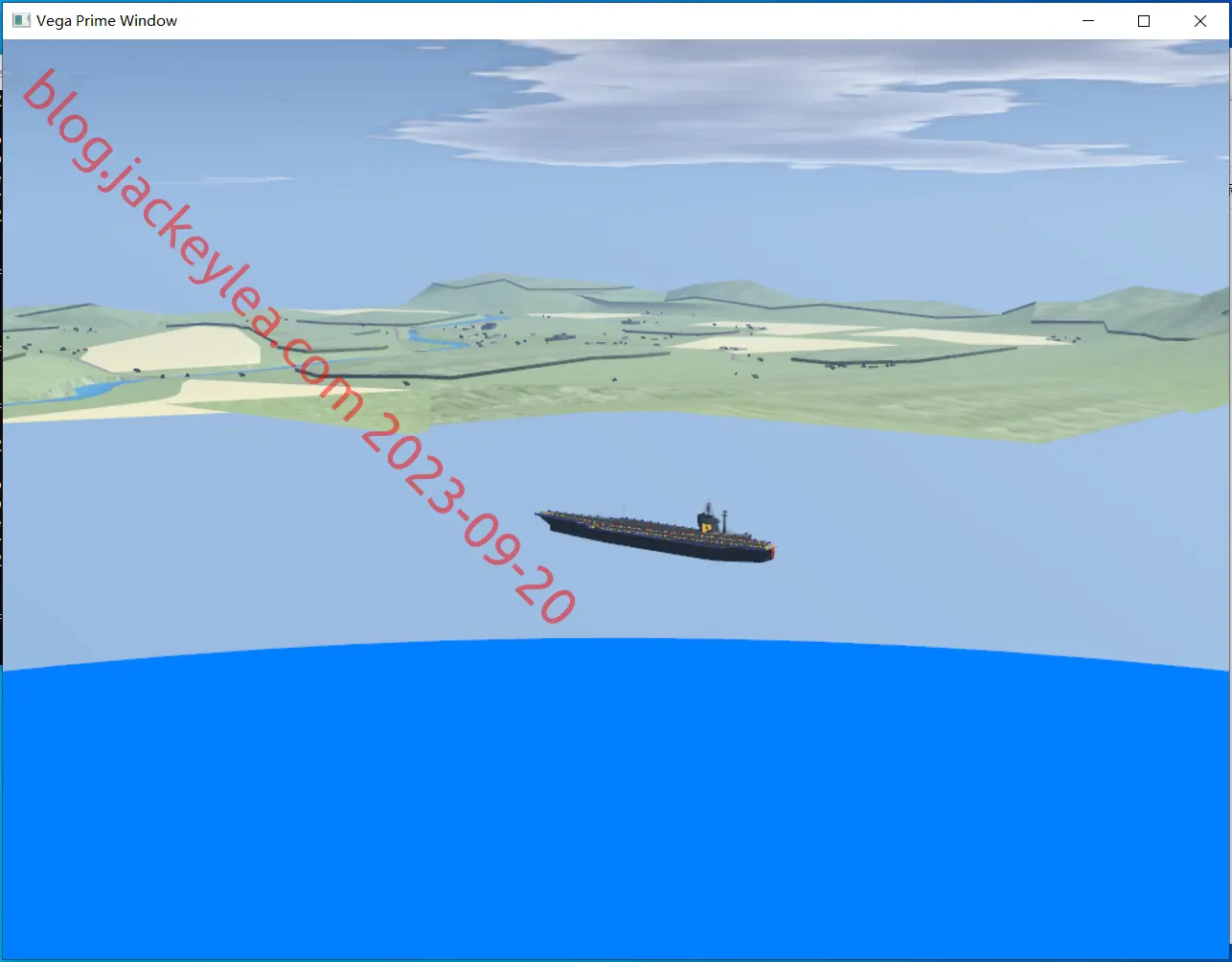
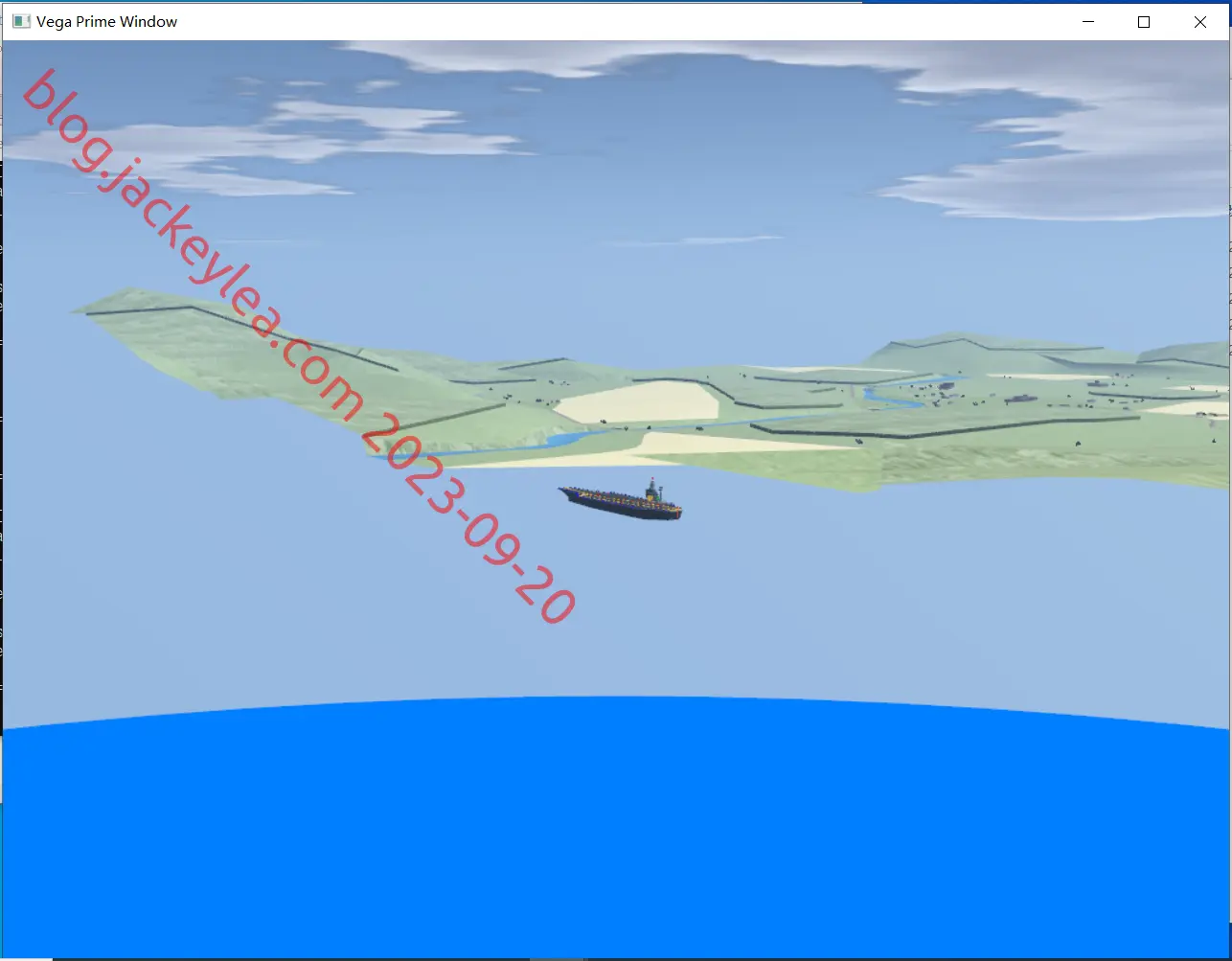
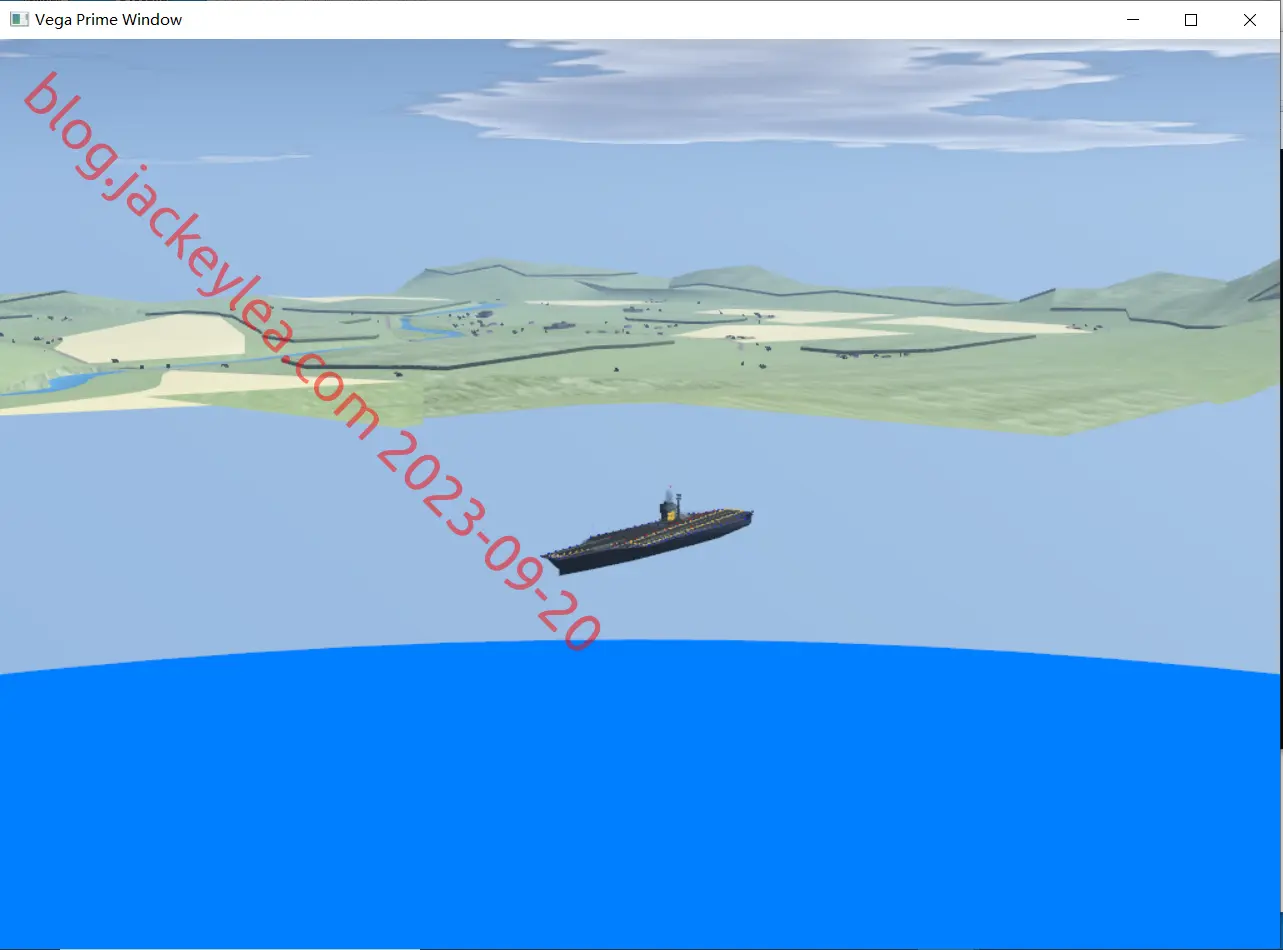
测试模型为航空母舰,默认位置XYZ为(0,0,0),默认方向HPR为(0,0,0)
x
 |  |
y
 |  |
z
 |  |
原来的数值不明显,换个明显的
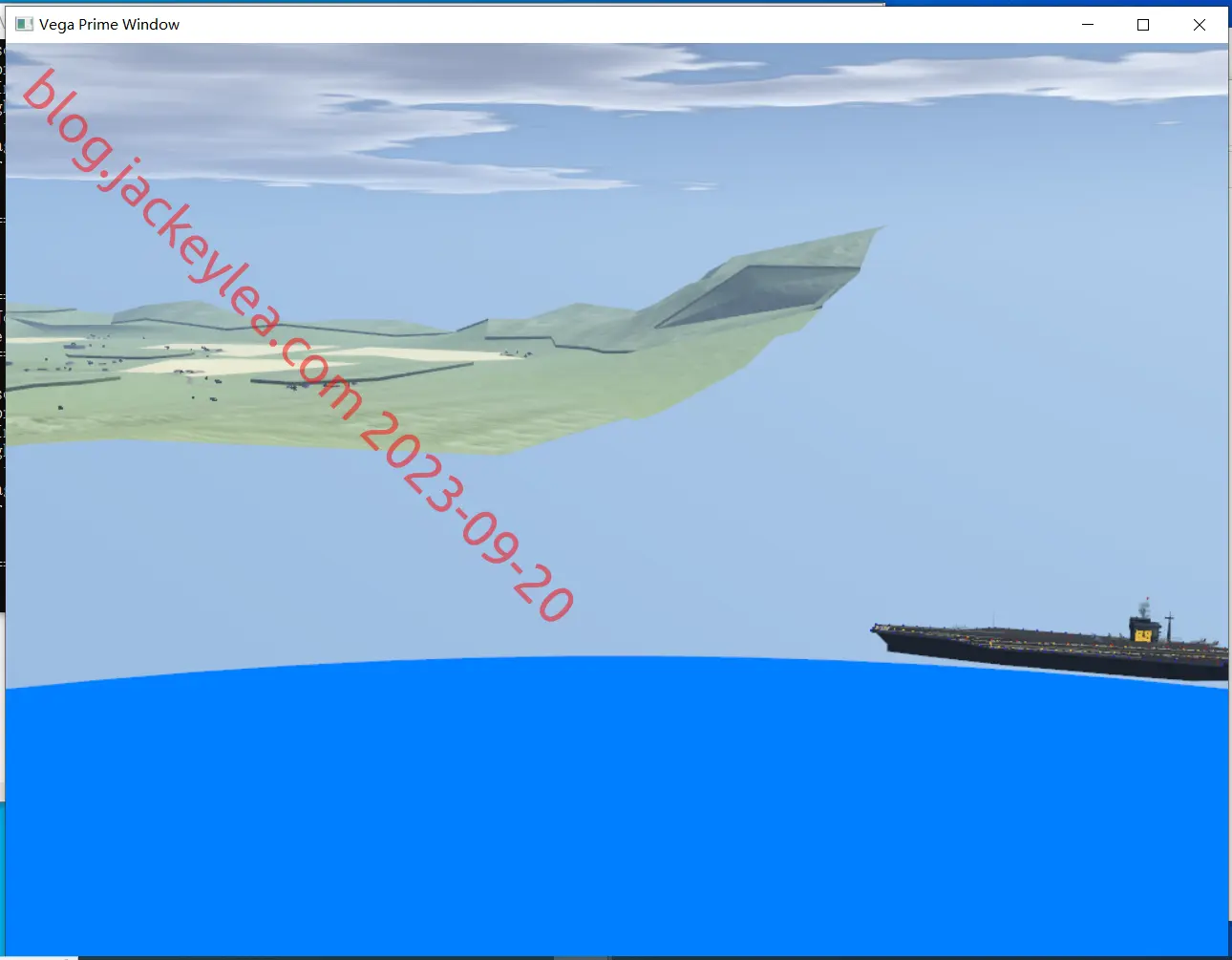
h
 | 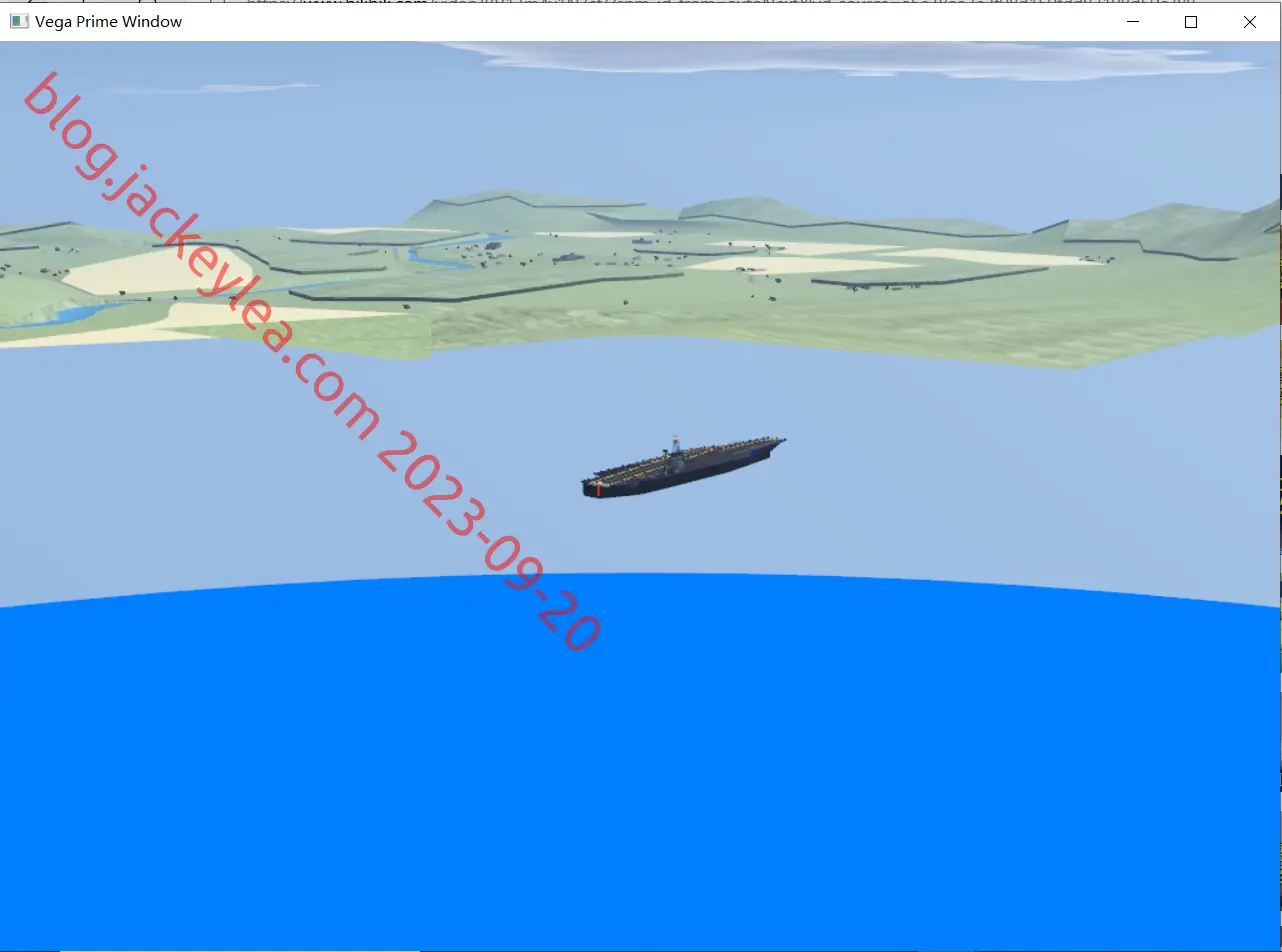 |
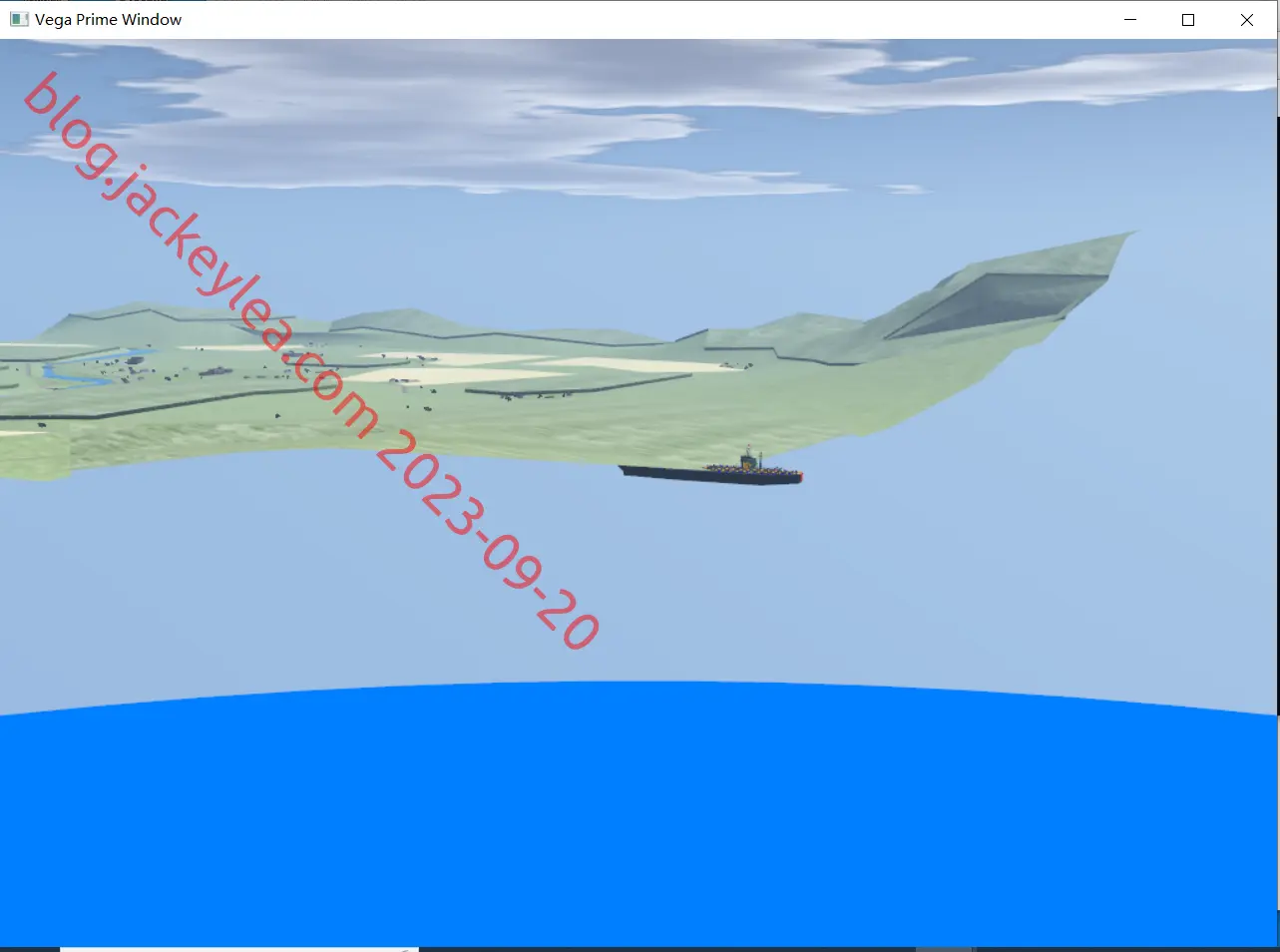
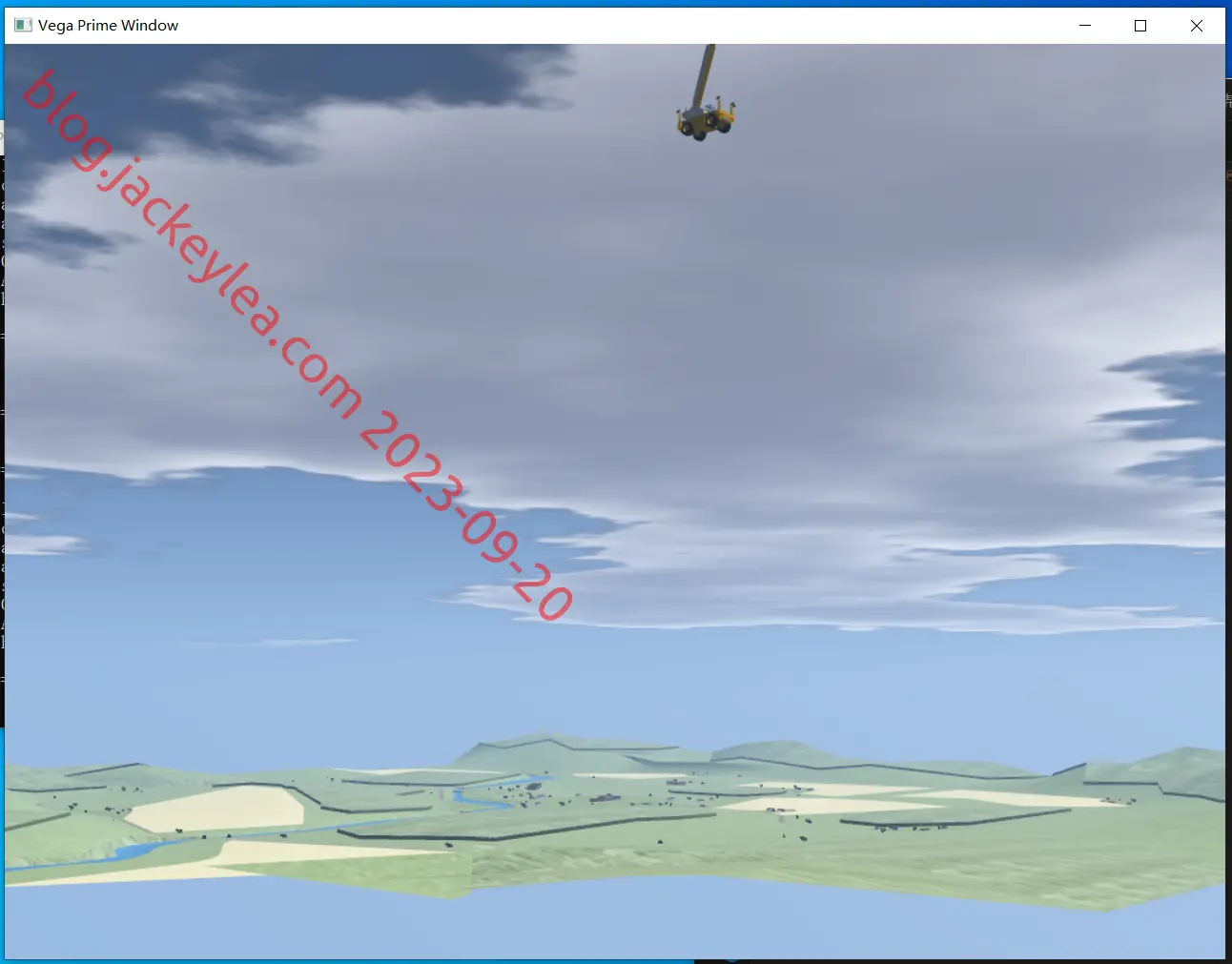
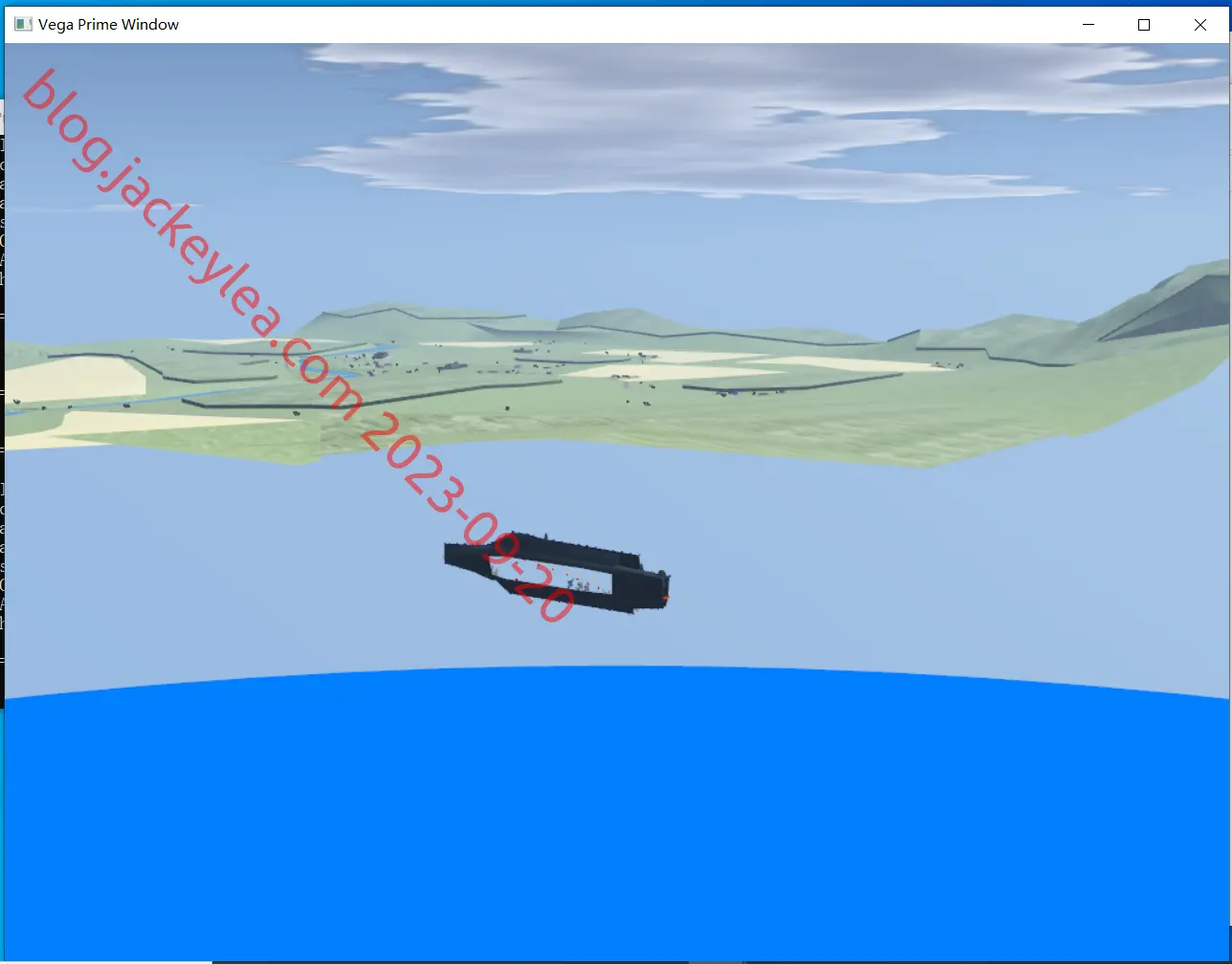
p
| |
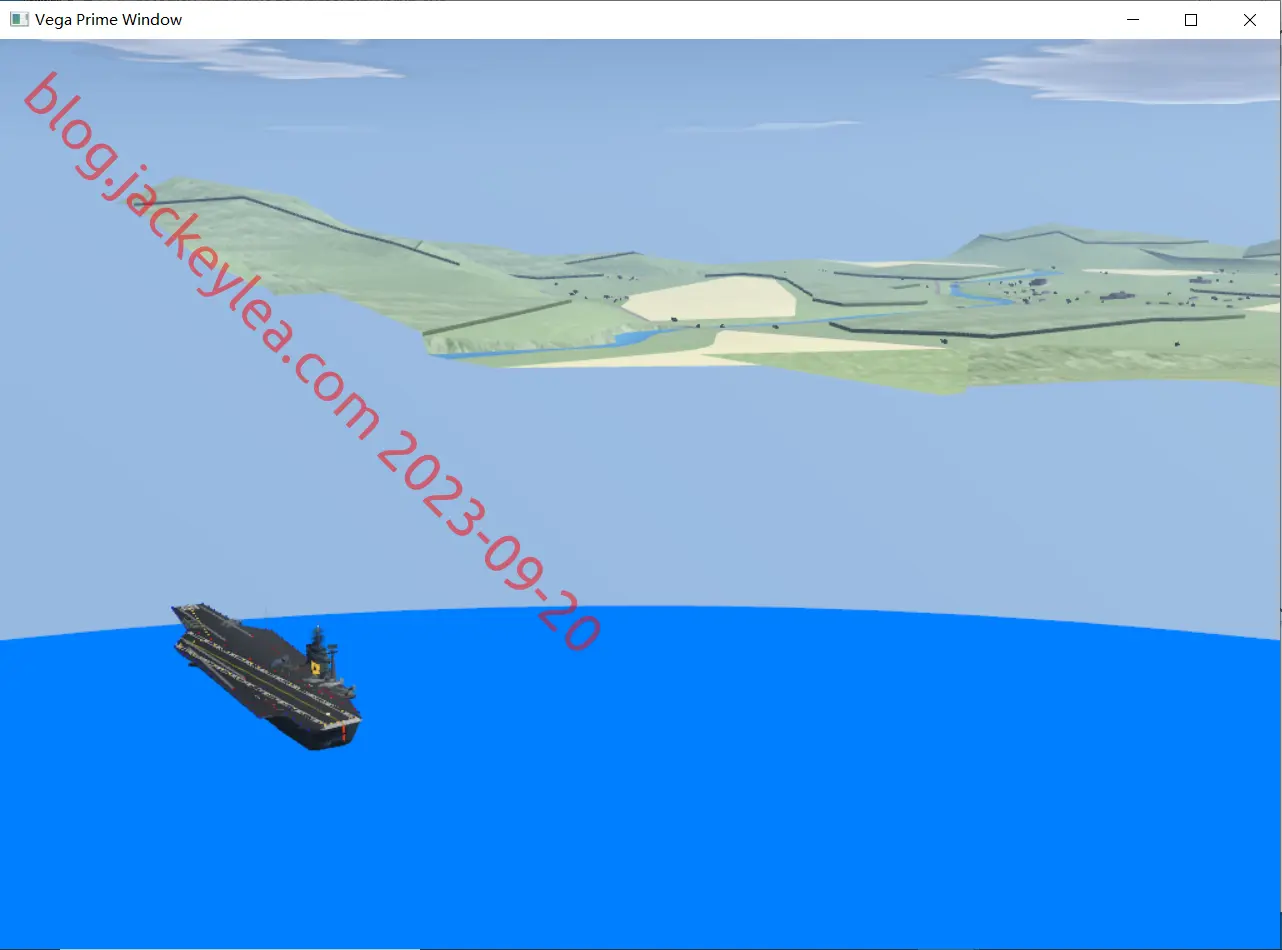
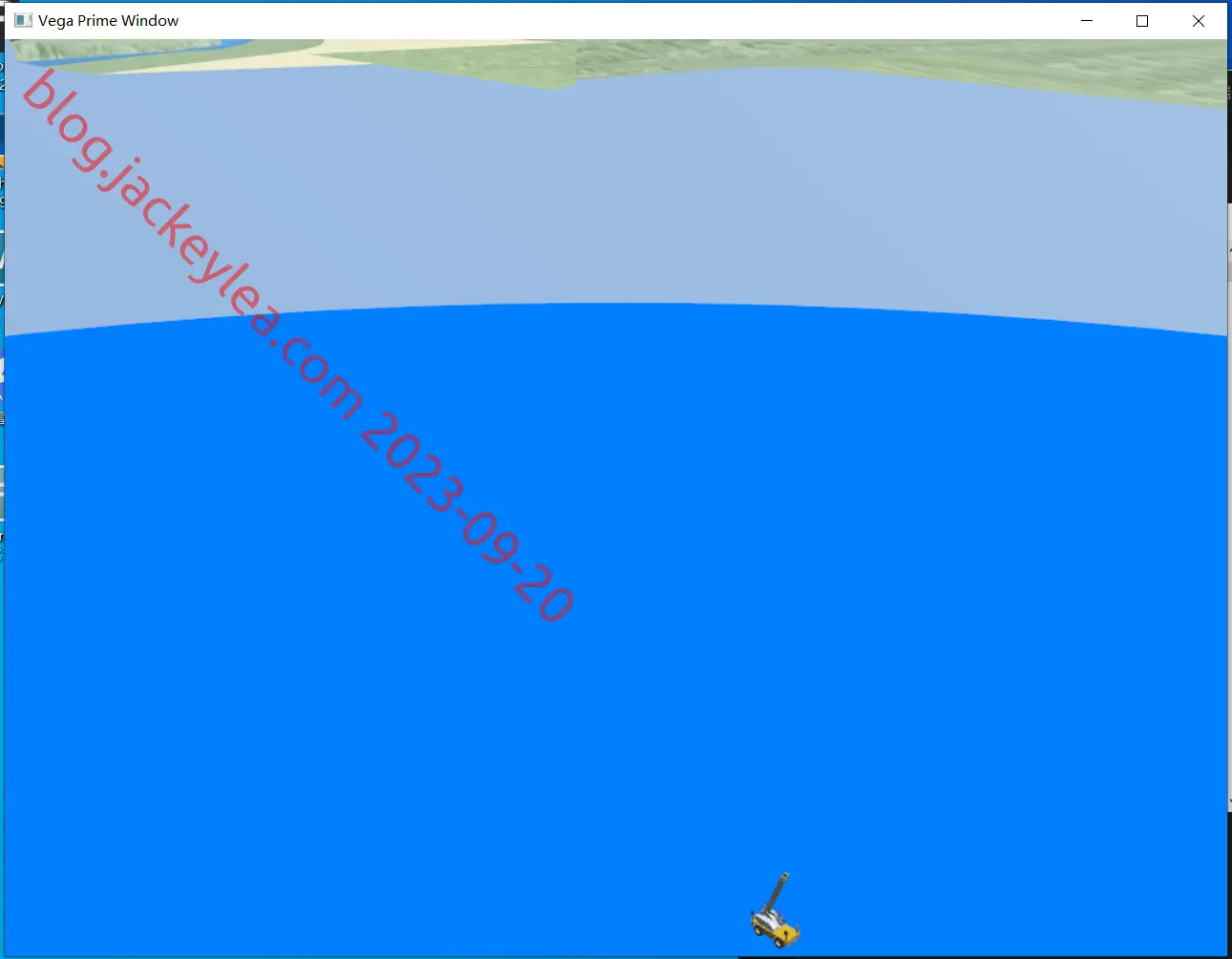
r
 | 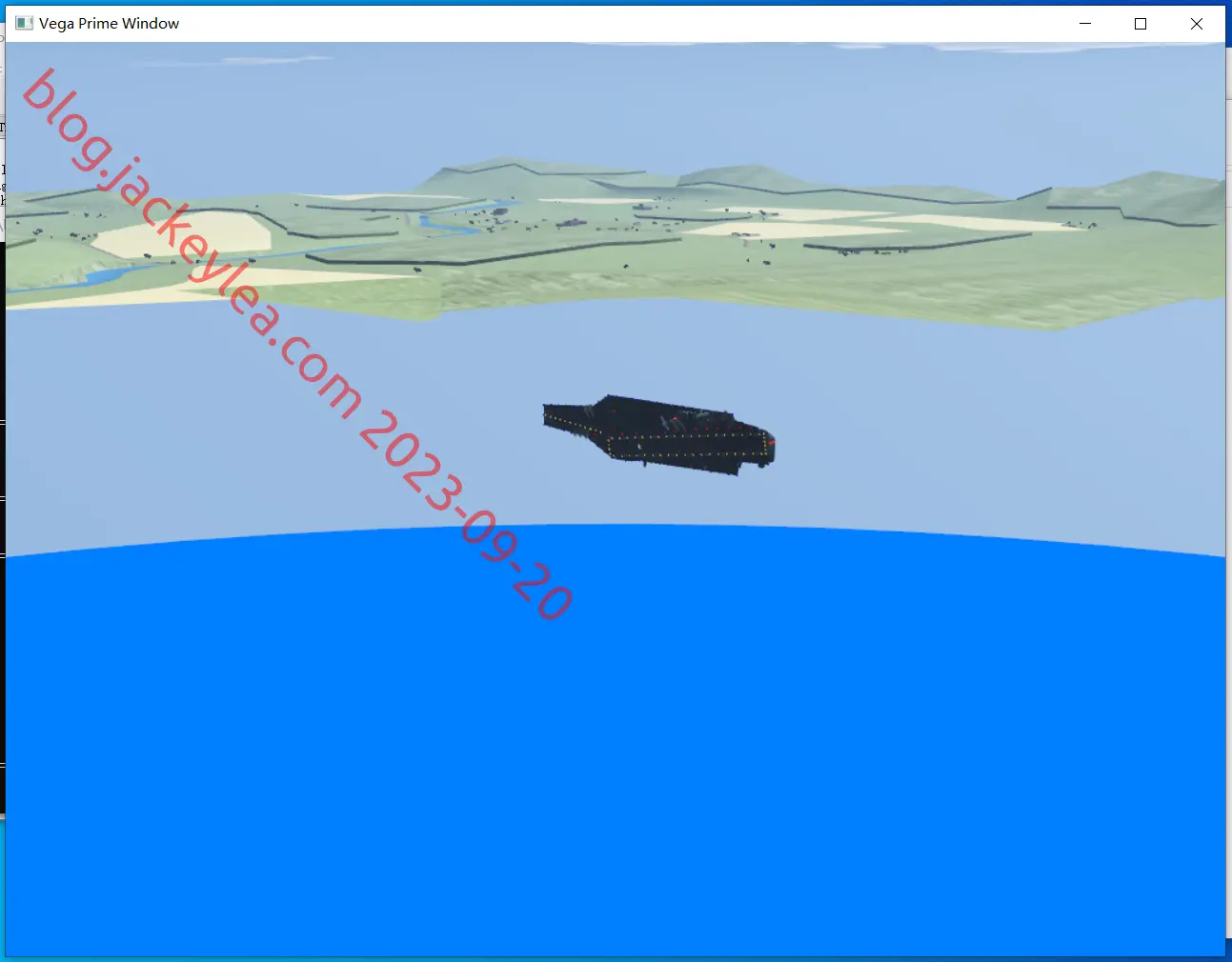 |
总结
- xyz在数据处理时是以(h,p,r)形式
通道坐标系
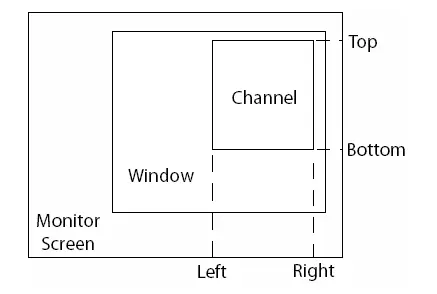
模型在窗口中显示,如果一个软件界面显示多个窗口,那么每个窗口即是一个通道(Channel),或者称为视图。通道坐标系用于描述通道窗口的位置。
通道界面坐标接口如下:
1 | |
此方法设置图像将映射到的窗口的矩形区域。这些值表示通道在归一化窗口空间中的位置。参数如下:
- left——从窗口左侧到查看矩形左侧的归一化距离。
- right——从窗口左侧到查看矩形右侧的归一化距离。
- bottom——从窗口底部到查看矩形底部的归一化距离。
- top——从窗口底部到查看矩形顶部的归一化距离。
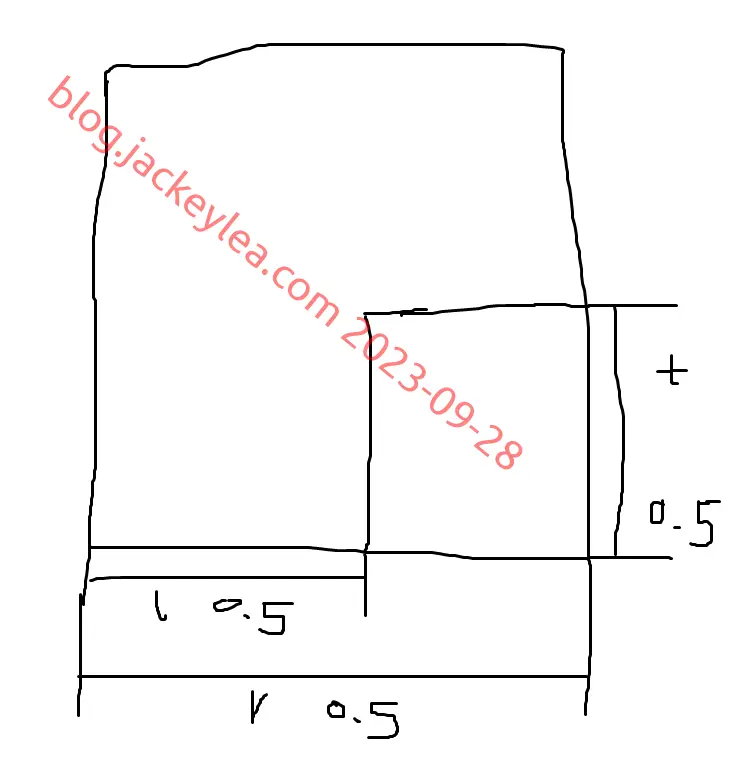
此图显示了这些操作的示例:
全屏
(0,1.0,0.0,1.0)
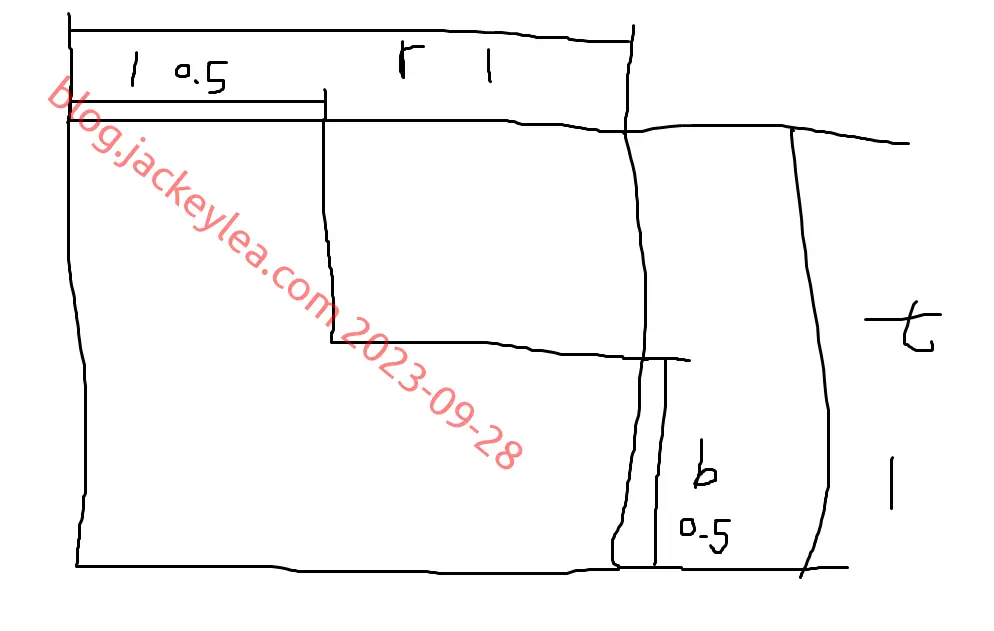
左上角
(0,0.5,0.5,1)
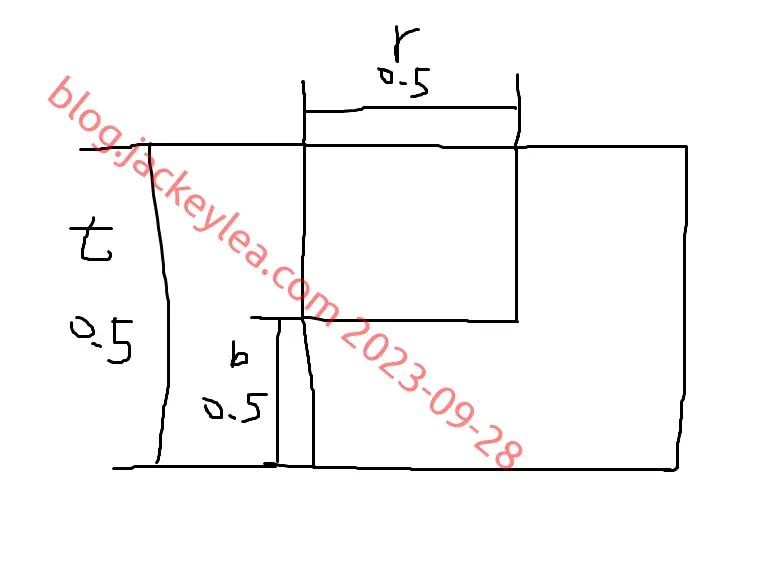
右上角
(0.5,1,0.5,1)
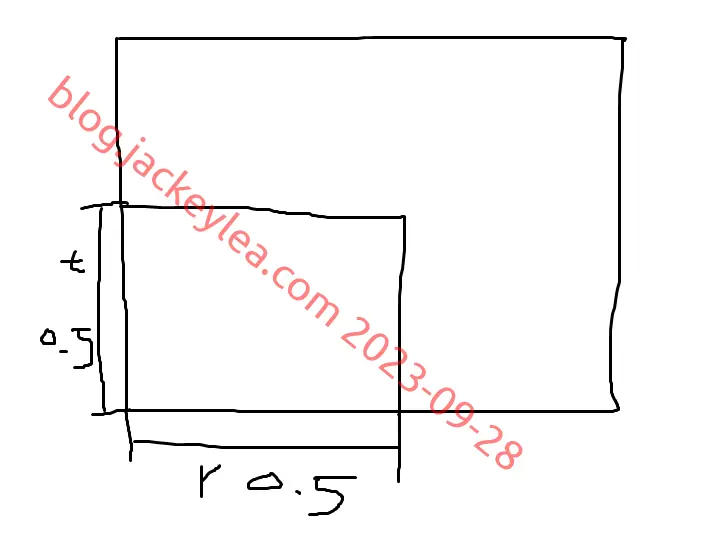
左下角
(0,0.5,0,0.5)
右下角
(0.5,1,0,0.5)
交流群
群主是《Vega Prime实时三维虚拟现实开发技术》和《Vega Prime虚拟现实开发技术》的作者王孝平。

Vega Prime入门教程08.07:坐标系简介
https://blog.jackeylea.com/vegaprime/coordinate-system-of-vegaprime/

